About twenty years ago underwater archaeologists began to write a new and fascinating chapter in the history of their discipline: the study of the incredibly well-preserved wrecks that lie at depths inaccessible to human divers.
Research and development
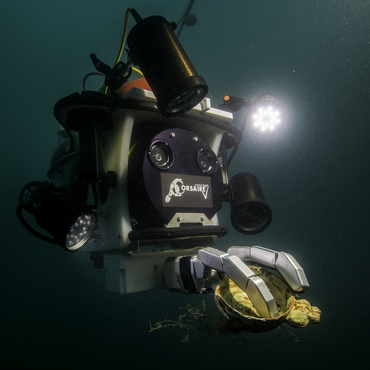
It all began in 2007 when DRASSM archaeologists and the naval architecture firm Mauric combined their respective areas of expertise to design a research vessel aimed specifically at deep-water archaeology. The result was the André Malraux, launched in 2012. There followed CORSAIRE, an innovative programme of works to develop underwater robotics for the purpose of salvaging deep-water wrecks. DRASSM continues to develop such tools in collaboration with the Montpellier Laboratory of Computer Science, Robotics and Microelectronics and numerous other partners, engineers, roboticists and industrial companies. Operations went live in 2012 with the excavation of the Lune.
From Speedy to Ocean One
After an initial period of using industrial ROVs (Remotely Operated Vehicles), a pioneering prototype came into play in 2014: Speedy. Jointly developed by DRASSM and the LIRMM, the robot was given a three-fingered hand for grasping objects. In 2015 Poitiers-based Institut Pprime, in association with numerous other research laboratories and DRASSM, launched Seahand, a complementary programme with the aim of developing a haptic hand which would enable archaeologists to ‘feel’ artefacts manipulated by the intermediary of a robotic device.
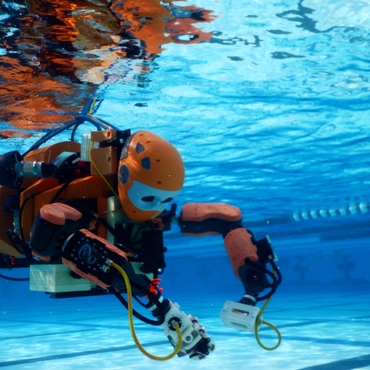
The ambition of building a humanoid robot able to dive 2,000 metres and work as the intermediary to the eyes and hands of an archaeologist at the surface was achieved with the launch of Ocean One. Designed and built by Stanford University (California), the device was entrusted to DRASSM for sea trials. With Ocean One, archaeologists will be able to push even further the boundaries of their investigations and realize their dreams.