Depuis une vingtaine d’années, les archéologues sous-marins ont ouvert un passionnant chapitre, celui des épaves englouties à des profondeurs inaccessibles à l’homme, et étant incroyablement bien conservées.
Recherche et développement
Tout commence avec la construction de l’André Malraux, navire conçu en 2007 et baptisé en 2012. La conception, par les archéologues du DRASSM et le Bureau d'Etudes Mauric, de ce navire de recherche fut l’indispensable préalable à l'archéologie des abysses. Elle se prolonge avec le projet CORSAIRE (Consortium Opérationnel en Robotique Sous-marine pour l'Archéologie Innovante et la Récupération d'Épaves), qui jette après 2012 les bases d’un programme innovant associant le DRASSM, le LIRMM (Université de Montpellier) et de nombreux partenaires, ingénieurs, roboticiens, industriels. Initié en 2007, celui-ci entre en phase opérationnelle en 2012 sur l’épave de la Lune.
De Speedy à Ocean One
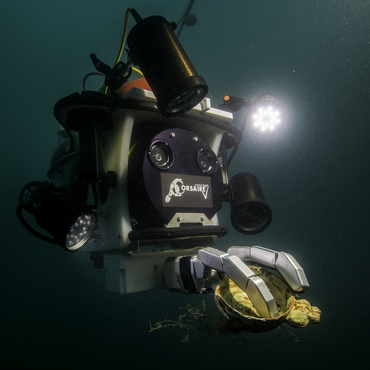
Après les ROV (Remotely Operated Vehicle) industriels, c’est un prototype de robot totalement novateur qui voit le jour en 2014. Fruit de la collaboration entre le LIRMM et le DRASSM, Speedy est équipé d’une main à trois doigts pour saisir des objets. L’objectif du programme Seahand, piloté depuis 2015 par l'Institut Pprime basé à Poitiers et qui associe le DRASSM à de nombreux laboratoires, est désormais de concevoir une main « haptique », véritable prolongement sensoriel de l’archéologue.
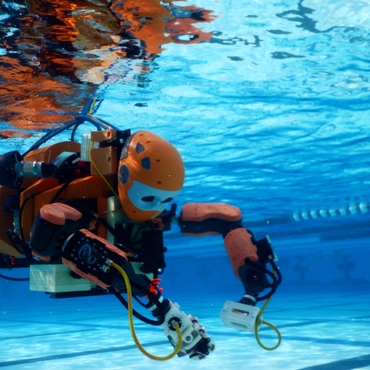
L’espoir de créer un humanoïde capable de descendre jusqu’à 2000 m de profondeur et d’y travailler en suppléant à la fois les yeux et les mains des archéologues restés en surface, s’accomplit avec le robot Ocean One conçu et créé par l’Université Stanford (Californie) et dont le DRASSM a la charge des campagnes d'essai en mer. Avec lui, les archéologues vont pouvoir repousser plus encore les limites de leur champ d’investigation et concrétiser leurs rêves.